Master Thesis of Dolf Muijers
Traditionally, design and fabrication have a weak link in the construction industry. Different specialists work on various problems during the total process. But a building is not the sum of different elements; everything is connected. Computational designs could be a solution, they do not have a fixed shape, but certain geometric boundaries (parameters). A design with changing parameters is flexible, which makes adaptations in a later phase of the design process easier to integrate.
The construction industry is not eager to change the way it functions, because for known methods, building time and costs can easily be predicted. For new methods this is more difficult. The only way you can persuade the construction industry to use new methods, is if they save time and/or money.
Combining computational design with robotic fabrication can be a solution to bridge the gap between design and fabrication.
Industrial robots could be the ideal tool for architects and structural engineers. They can transfer digital design data directly to a full-scale, automated fabrication of a structure. The computational design can be optimized, so the materials are optimally used and the material waste is minimized. It is important to take limitations like robotic reach and structural stability during assembly into account during the design phase, because they could have an important influence on the final result. This way of digital design and fabrication will enhance the collaboration between architecture, structural design, and production.
My thesis consists of two main parts: ‘Robotic fabrication’ and the final ‘Timber Structure’. At the start of the thesis, the goal was to investigate and explore these two main parts parallel during the whole thesis. In this way, information and results gathered at one part can directly be implemented in the other part. This leads to a design in which the robotic and material limitations are part of the design process and are directly taking into account from the start. This way of parallel research could have prevented problems in a late stadium of the thesis.
But because of the COVID-19 Pandemic it was impossible to test in the structures lab for four months. During this time I focused on the timber structure model, preventing delay of my thesis. However, it made parallel research and testing impossible.
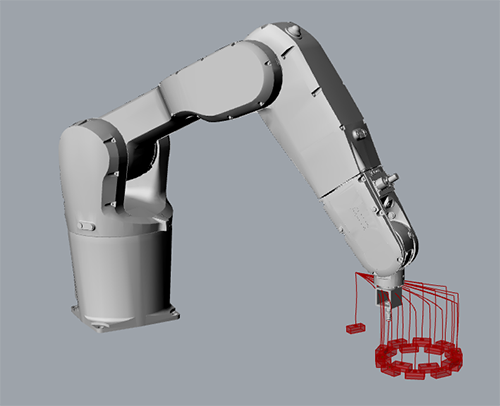
Figure 1: Robotstudio simulation performing scripted pick-and-place tasks

Figure 2: Robot performing pick-and-place tasks as scripted in Grasshoppper
Robotic fabrication
This part of the thesis focusses on understanding how the robot works. The first step is looking which tasks are necessary to create the final structure, like pick-and-place and milling. The next step is trying to make these tasks as simple as possible. An example for milling would be: mill a straight line. The simple task approach is chosen because when something goes wrong, it is easier to understand what the problem is and how it could be solved.
The tasks are programmed in Grasshopper with the plugin RobotComponents. This component works by defining target planes for the tool of the robot. RobotComponents creates a path through these target planes. Simply put, it says to the robot go from point A to point B with speed X. RobotComponents directly generates Rapid-code, which can be loaded into RobotStudio. Robotstudio is the simulation software of ABB. It provides you a platform in which you can check if your script works or if it still has some bugs. If the simulation completely runs in RobotStudio, your robot will work.
If the robot performs the simple task as expected during testing, complexity will be increased step by step to monitor and understand the behavior of the robot. This process is repeated until the tasks are complex enough to execute the fabrication of the final structure.
Timber Structure
This part of the thesis focuses on creating an optimized model of a timber structure. The timber structure model will form the basis for the scale model that will be constructed with the robotic arm in the structures lab. It first started with a literature study of several important aspects: structural principle, material properties, structural form, robotic limitations, and connections. This information is then integrated into one design. This design is a parametric design created in Grasshopper. Structural analysis software (SAS), Oasys GSA, will be used to check the structural strength and stiffness of the timber structure. Geometry Gym GSA (ggGA) will be used to connect Grasshopper with GSA. This plugin in Grasshopper makes it possible to directly bake your structural data, like nodes, elements, material properties, section properties, and loads, and create a model in GSA that can be tested.
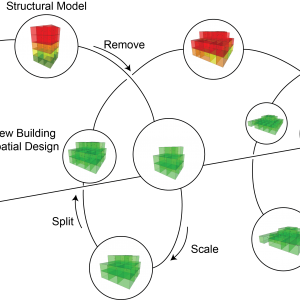
The next step is optimizing the design by changing the parameters in a way that the structural strength, stiffness, and connections fulfill the requirements. The data is scripted in a way that everything changes automatically if a parameter is changed. For Instance, if snow accumulation is governing, the shape of the roof can be adapted by moving some sliders. The middle part of the roof will be lifted, leading to lower roof angles. Since the wind load depends on the roof angles, changing these angles can lower the wind load or decrease snow accumulation. This would lead to a lower unity check, which will make it possible to reduce the size of the structural elements. In this way, a lot of simulations can be run and valuable time will be saved because the data doesn’t need to be changed by hand. If the structural model is optimized, it can be scaled and fabricated by the robot.
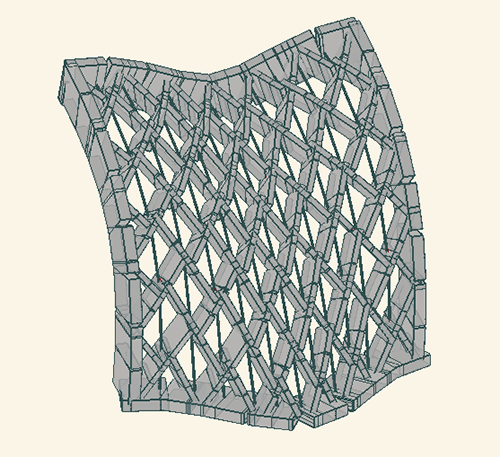
Figure 3: Structural model in GSA as imported from Grasshopper
Robotic fabrication of Timber structure
When the complex tasks are programmed and the timber model is finished, the last phase can be started: construction of the scale model. First, a total construction sequence needs to be formed which integrates all robotic tasks in one script. Furthermore, it is not known if the scale model is stable enough during the whole construction phase. Experimental tests will point out if temporary supports will be necessary. If all this knowledge is combined and all the bugs are solved, the construction of the scaled timber model - that is fully constructed by a robotic arm - will start.
I hope my research will lead to a scale model that can be constructed without human interference. Furthermore, I hope my thesis gives new insights into the way we construct buildings. Together we can bridge the gap between design and fabrication.